miriam
Modular IntRalogistics Intelligent plAtforM
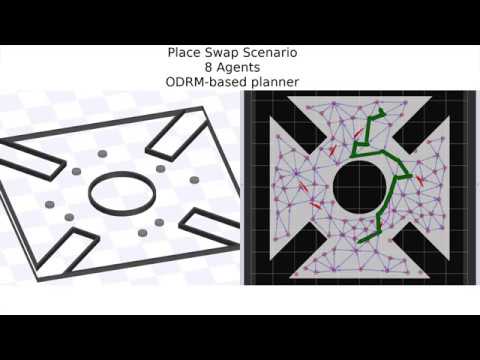
Optimized Directed Roadmap Graph for Multi-Agent Path Finding Using Stochastic Gradient Descent
The Paper
bibtex:
@inproceedings{Henkel2020,
author = {Henkel, Christian and Toussaint, Marc},
title = {Optimized Directed Roadmap Graph for Multi-Agent Path Finding Using Stochastic Gradient Descent},
booktitle = {The 35th ACM/SIGAPP Symposium on Applied Computing (SAC '20)},
address = {Brno, Czech Republic},
isbn = {978-1-4503-6866-7/20/03},
doi = {10.1145/3341105.3373916},
keywords = {Multi-agent planning,Multi-agent systems,Robotic autonomy},
year = {2020}
}
Presentation video
Video Attachment